激光雷达学习笔记(二)数据读取和显示
我使用的激光雷达都是日本产北阳电机公司Hokuyo的产品,URG04LX和UTM-30LX。UTM-30LX的价格贵一些,10买的时候大概3W,现在taobao价貌似已经涨到5W了,当然URG04LX也涨价了,09年买的时候是1W,只是不知道现在涨到了多少。
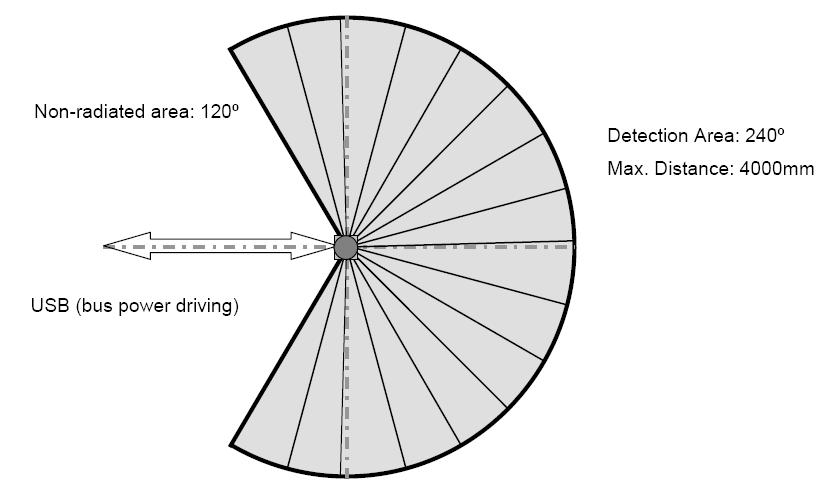
URG-04LX基本参数:
激光类型:λ=785nm,Class1,0.8mw激光扫描距离:20-5600 mm扫描范围:240度角度分辨率:0.36度距离分辨率:1mm精度:距离 0.06-1m:+30 距离 1-4m:30%扫描时间:100ms (10Hz刷新率)接口类型:USB 2.0输入电压:5V消耗电流:500mA (最高可达800mA)重量:160g尺寸:50x50x70mm典型寿命:5年
上一篇文章中提到,激光雷达的算法最终是需要移植到嵌入式设备上的,因此还是希望用C/C++来开发,这样便于移植。只是C++读取ubh格式的文件稍微有些麻烦,而在实时应用中也是直接从激光雷达获取一帧的数据进行处理,不会去读取ubh格式的文件,这里偷个懒,直接用Matlab将ubh文件拆分成一帧一帧的数据文件,然后再由C++一帧一帧的读取。 Matlab已经能够将数据一帧一帧的读取出来,那么稍微改动几句据可以将每帧拆分成单个的文件存储。
此时逐帧读取数据就可以连续的进行数据显示,下一步就是数据处理了~~那就看下一篇吧~~激光雷达数据读取以及显示代码:
http://download.csdn.net/detail/renshengrumenglibing/5076486