虚拟机中的锁优化简介 ---- 适应性自旋/锁粗化/锁削除/轻量级锁/偏向锁 (转载)
转载自 ---- http://icyfenix.iteye.com/blog/1018932
?
????? 高效并发是JDK 1.6的一个重要主题,HotSpot虚拟机开发团队在这个版本上花费了大量的精力去实现各种锁优化技术,如适应性自旋(Adaptive Spinning)、锁削除(Lock Elimination)、锁膨胀(Lock Coarsening)、轻量级锁(Lightweight Locking)、偏向锁(Biased Locking)等,这些技术都是为了在线程之间更高效地共享数据,以及解决竞争问题,从而提高程序的执行效率。
13.3.1 自旋锁与自适应自旋
前面我们讨论互斥同步的时候,提到了互斥同步对性能最大的影响是阻塞的实现,挂起线程和恢复线程的操作都需要转入内核态中完成,这些操作给系统的并发性能带来了很大的压力。同时,虚拟机的开发团队也注意到在许多应用上,共享数据的锁定状态只会持续很短的一段时间,为了这段时间去挂起和恢复线程并不值得。如果物理机器有一个以上的处理器,能让两个或以上的线程同时并行执行,我们就可以让后面请求锁的那个线程“稍等一会”,但不放弃处理器的执行时间,看看持有锁的线程是否很快就会释放锁。为了让线程等待,我们只须让线程执行一个忙循环(自旋),这项技术就是所谓的自旋锁。
自旋锁在JDK 1.4.2中就已经引入,只不过默认是关闭的,可以使用-XX:+UseSpinning参数来开启,在JDK 1.6中就已经改为默认开启了。自旋等待不能代替阻塞,且先不说对处理器数量的要求,自旋等待本身虽然避免了线程切换的开销,但它是要占用处理器时间的,所以如果锁被占用的时间很短,自旋等待的效果就会非常好,反之如果锁被占用的时间很长,那么自旋的线程只会白白消耗处理器资源,而不会做任何有用的工作,反而会带来性能的浪费。因此自旋等待的时间必须要有一定的限度,如果自旋超过了限定的次数仍然没有成功获得锁,就应当使用传统的方式去挂起线程了。自旋次数的默认值是10次,用户可以使用参数-XX:PreBlockSpin来更改。
在JDK 1.6中引入了自适应的自旋锁。自适应意味着自旋的时间不再固定了,而是由前一次在同一个锁上的自旋时间及锁的拥有者的状态来决定。如果在同一个锁对象上,自旋等待刚刚成功获得过锁,并且持有锁的线程正在运行中,那么虚拟机就会认为这次自旋也很有可能再次成功,进而它将允许自旋等待持续相对更长的时间,比如100个循环。另一方面,如果对于某个锁,自旋很少成功获得过,那在以后要获取这个锁时将可能省略掉自旋过程,以避免浪费处理器资源。有了自适应自旋,随着程序运行和性能监控信息的不断完善,虚拟机对程序锁的状况预测就会越来越准确,虚拟机就会变得越来越“聪明”了。
13.3.2 锁削除
锁削除是指虚拟机即时编译器在运行时,对一些代码上要求同步,但是被检测到不可能存在共享数据竞争的锁进行削除。锁削除的主要判定依据来源于逃逸分析的数据支持(第11章已经讲解过逃逸分析技术),如果判断到一段代码中,在堆上的所有数据都不会逃逸出去被其他线程访问到,那就可以把它们当作栈上数据对待,认为它们是线程私有的,同步加锁自然就无须进行。
也许读者会有疑问,变量是否逃逸,对于虚拟机来说需要使用数据流分析来确定,但是程序员自己应该是很清楚的,怎么会在明知道不存在数据争用的情况下要求同步呢?答案是有许多同步措施并不是程序员自己加入的,同步的代码在Java程序中的普遍程度也许超过了大部分读者的想象。我们来看看下面代码清单13-6中的例子,这段非常简单的代码仅仅是输出三个字符串相加的结果,无论是源码字面上还是程序语义上都没有同步。
代码清单 13-6 一段看起来没有同步的代码
然后,虚拟机将使用CAS操作尝试将对象的Mark Word更新为指向Lock Record的指针。如果这个更新动作成功了,那么这个线程就拥有了该对象的锁,并且对象Mark Word的锁标志位(Mark Word的最后两个Bits)将转变为“00”,即表示此对象处于轻量级锁定状态,这时候线程堆栈与对象头的状态如图13-4所示。
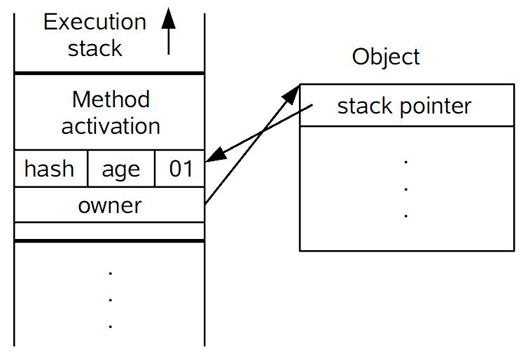
(注2:图13-3和图13-4来源于HotSpot虚拟机的一位Senior Staff Engineer――Paul Hohensee所写的PPT《The Hotspot Java Virtual Machine》)
如果这个更新操作失败了,虚拟机首先会检查对象的Mark Word是否指向当前线程的栈帧,如果是就说明当前线程已经拥有了这个对象的锁,那就可以直接进入同步块继续执行,否则说明这个锁对象已经被其他线程抢占了。如果有两条以上的线程争用同一个锁,那轻量级锁就不再有效,要膨胀为重量级锁,锁标志的状态值变为“10”,Mark Word中存储的就是指向重量级锁(互斥量)的指针,后面等待锁的线程也要进入阻塞状态。
上面描述的是轻量级锁的加锁过程,它的解锁过程也是通过CAS操作来进行的,如果对象的Mark Word仍然指向着线程的锁记录,那就用CAS操作把对象当前的Mark Word和线程中复制的Displaced Mark Word替换回来,如果替换成功,整个同步过程就完成了。如果替换失败,说明有其他线程尝试过获取该锁,那就要在释放锁的同时,唤醒被挂起的线程。
轻量级锁能提升程序同步性能的依据是“对于绝大部分的锁,在整个同步周期内都是不存在竞争的”,这是一个经验数据。如果没有竞争,轻量级锁使用CAS操作避免了使用互斥量的开销,但如果存在锁竞争,除了互斥量的开销外,还额外发生了CAS操作,因此在有竞争的情况下,轻量级锁会比传统的重量级锁更慢。
13.3.5 偏向锁
偏向锁也是JDK 1.6中引入的一项锁优化,它的目的是消除数据在无竞争情况下的同步原语,进一步提高程序的运行性能。如果说轻量级锁是在无竞争的情况下使用CAS操作去消除同步使用的互斥量,那偏向锁就是在无竞争的情况下把整个同步都消除掉,连CAS操作都不做了。
偏向锁的“偏”,就是偏心的“偏”、偏袒的“偏”。它的意思是这个锁会偏向于第一个获得它的线程,如果在接下来的执行过程中,该锁没有被其他的线程获取,则持有偏向锁的线程将永远不需要再进行同步。
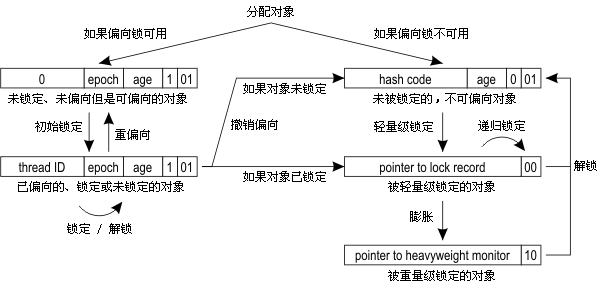
如果读者读懂了前面轻量级锁中关于对象头Mark Word与线程之间的操作过程,那偏向锁的原理理解起来就会很简单。假设当前虚拟机启用了偏向锁(启用参数-XX:+UseBiasedLocking,这是JDK 1.6的默认值),那么,当锁对象第一次被线程获取的时候,虚拟机将会把对象头中的标志位设为“01”,即偏向模式。同时使用CAS操作把获取到这个锁的线程的ID记录在对象的Mark Word之中,如果CAS操作成功,持有偏向锁的线程以后每次进入这个锁相关的同步块时,虚拟机都可以不再进行任何同步操作(例如Locking、Unlocking及对Mark Word的Update等)。
当有另外一个线程去尝试获取这个锁时,偏向模式就宣告结束。根据锁对象目前是否处于被锁定的状态,撤销偏向(Revoke Bias)后恢复到未锁定(标志位为“01”)或轻量级锁定(标志位为“00”)的状态,后续的同步操作就如上面介绍的轻量级锁那样执行。偏向锁、轻量级锁的状态转化及对象Mark Word的关系如图13-5所示。
偏向锁可以提高带有同步但无竞争的程序性能。它同样是一个带有效益权衡(Trade Off)性质的优化,也就是说它并不一定总是对程序运行有利,如果程序中大多数的锁都总是被多个不同的线程访问,那偏向模式就是多余的。在具体问题具体分析的前提下,有时候使用参数-XX:-UseBiasedLocking来禁止偏向锁优化反而可以提升性能。